
Page 35 - 英格索兰人机工程学吊装系统
P. 35
18
Zimmerman禹偒苮じ
900J⡛ⲙ瑟㘗(360䏞)
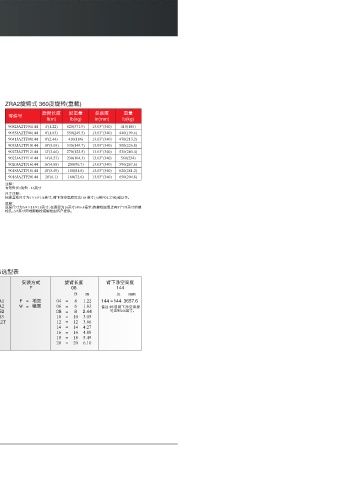
ZRA2偒苮䒭 360䏞偒鲮(ꅾ鲿)
偒苮 偒苮䏞 饰ꅾꆀ 䚪넞䏞 ꅾꆀ
ꨪ⟝〿
ft(m) lb(kg) in(mm) lb(kg)
9082JA2TF04144 4'(1.22) 820(371.9) 13.03"(340) 410(186)
剣佪苮 = 偒苮 - 16"
9055JA2TF06144 6'(1.83) 550(249.5) 13.03"(340) 440(199.6)
9041JA2TF08144 8'(2.44) 410(186) 13.03"(340) 470(213.2)
9033JA2TF10144 10'(3.05) 330(149.7) 13.03"(340) 500(226.8)
9027JA2TF12144 12'(3.66) 270(122.5) 13.03"(340) 530(240.4)
䏀䏠ꂁ縨 9023JA2TF14144 14'(4.27) 230(104.3) 13.03"(340) 560(254)
OAH 9020JA2TF16144 16'(4.88) 200(90.7) 13.03"(340) 590(267.6)
A
9018JA2TF18144 18'(5.49) 180(81.6) 13.03"(340) 620(281.2)
9016JA2TF20144 20'(6.1) 160(72.6) 13.03"(340) 650(294.8)
U
岤ꅺ
剣佪苮=偒苮 - 16薉㼄
㽯㼄岤ꅺ
C 叻ⲥ用叙㽯㼄⚹661/4薉㼄苮♴ⲙ瑟넞䏞〳鴪168 薉㼄(14薉㽯/4.27碛)䧴⟄♴կ
A
䏀䏠
䏀䏠㽯㼄⚹3/41818薉㼄㖈湬䖈⚹16薉㼄(406.4嬗碛)涸轠吉㕐ワ♳剣8⚡7/8薉㼄涸轠
吉㶰կ3/4薉㼄涸㖑膃轠吉䧴轠吉歋㹐䨪䲿⣘կ
B
OAH = 䚪넞䏞 䏀䏠㽯㼄 A B C
U = 苮♴ⲙ瑟넞䏞 in mm in mm in mm
900J鲽鲿 18 457 0.875 22.2 16 406
900J⚥鲿⿺ꅾ鲿 24 610 0.875 22.2 20 508
爙⢾7105JS2F08144 偒苮じ鷥㘗邍
碫㘗 饰ꅾꆀ 偒苮 鲪麤碫䒭 㸝鄳倰䒭 偒苮䏞 苮♴ⲙ瑟넞䏞
7 105 J S2 F 08 144
lb kg ft m in mm
700J(220o) = 7 105 = 1050 476 J = Jib A1 = ZRA1 F = 㖑 04 = 4 1.22 144 = 144 3657.6
800J(360o) = 8 A2 = ZRA2 W = 㟖 06 = 6 1.83 㢊岤叻ⲥ苮♴ⲙ瑟넞䏞
900J(360o) = 9 S2 = ZRS2 08 = 8 2.44 〳鴪ⵌ168薉㼄կ
S3 = ZRS3 10 = 10 3.05
A2T = ZRA2T 12 = 12 3.66
14 = 14 4.27
16 = 16 4.88
18 = 18 5.49
20 = 20 6.10